Robots
We have created some great robots over the years. For videos of our robots in action, please visit our website's Media page. For match videos and scores, please visit our page on The Blue Alliance.

2026 Robot

Our 2026 season has been one for the ages. Throughout the entire season, we have been iterating on our robot, debuting new functionality at each event. We won the North Shore event and made it to the semifinals at Greater Boston. We had a semifinalist finish in the Burns Division at the New England District Championship and made it to the quarterfinals in the Daly Division at the FIRST Championship in Houston, falling to the eventual world champions.
Summary:
Our 2026 robot is able to travel under the Trench and over the Bump, intake Fuel from the ground, and score Fuel in the Hub from almost anywhere in the Alliance Zone.
Weight: 108.5 pounds
Scoring:
Our 2026 robot features a slap-down Fuel intake, a Twindexer hopper with linearly extending walls, a feeder tower, and a twin fly-wheel shooter with infinitely adjustable hood. Details on these subsystems are coming soon.
Drivebase:
Our 2026 drivebase is 27" by 27" and utilizes Swerve Drive Specialties' MK5n modules with lift kits. The two modules on the intake side are aligned towards each other while the two modules on the shooter side are aligned parallel with each other. Each module uses a Kraken X60 for drive and a Kraken X44 for steer. The electronics board is mounted to the top of the drivebase and faces towards the floor for easier access. The battery is accessed from above and is retained by a removable section of the hopper.
Autonomous:
Details on our autonomous systems are coming soon.
Achievements:
Win-Loss-Tie record in official play: (41-20-1). Overall: (52-27-1)
NE District - North Shore Event:
- Winners - First Pick of Alliance 1 (125, 5813, 3958)
- Autonomous Award
NE District - Greater Boston Event:
- Semifinalists - Captain of Alliance 8 (5813, 6731, 6201)
- Quality Award
New England District Championship - Burns Division:
- Semifinalists - First Pick of Alliance 5 (2713, 5813, 2079)
FIRST Championship - Daly Division:
- Quarterfinalists - First Pick of Alliance 5 (10213, 5813, 3339, 3314)
Battlecry 26 - May
- Finalists - First Pick of Alliance 2 (48, 5813, 271, 8567)
2025 Robot - Geyser
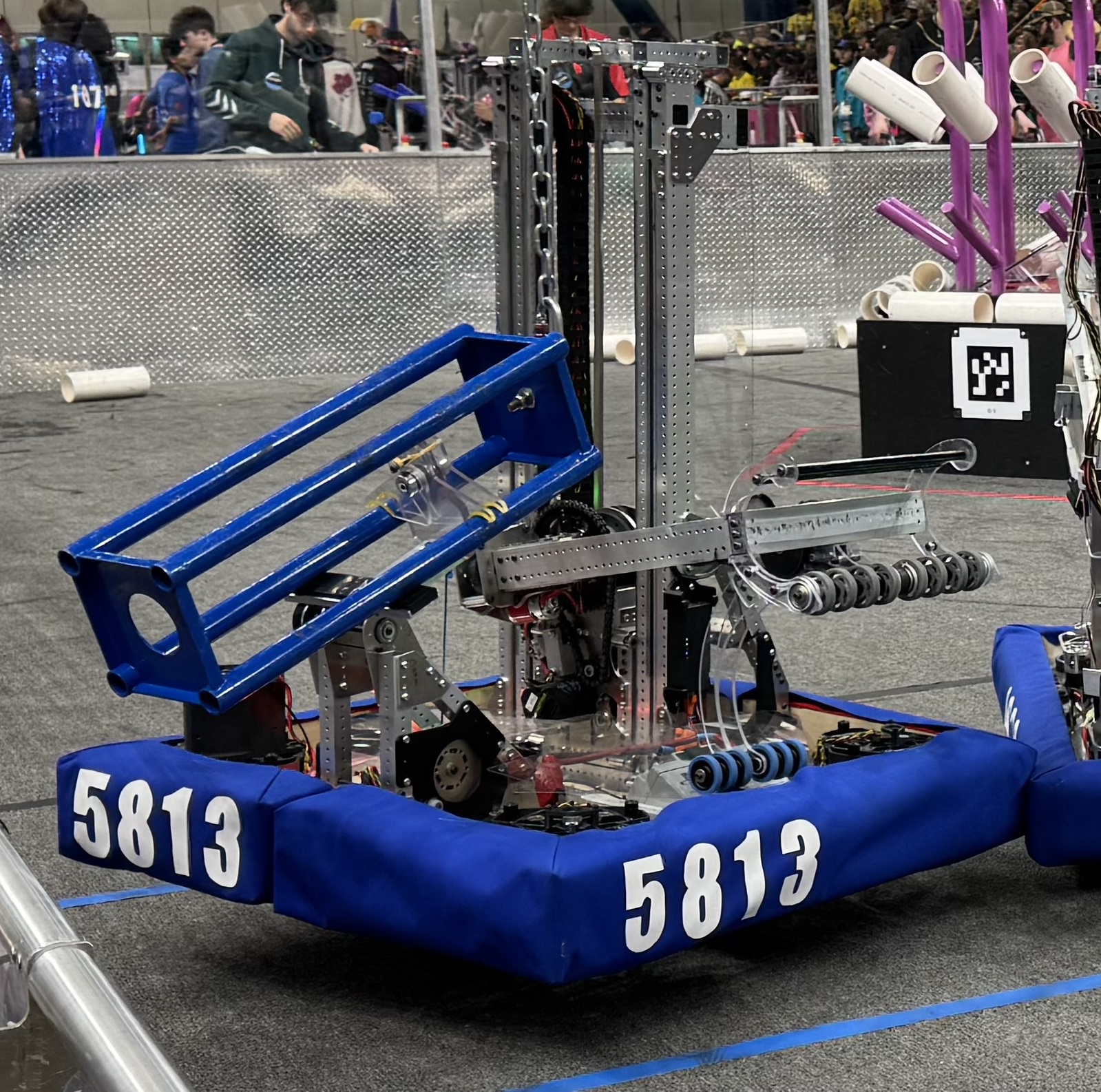
Our 2025 season made a big splash! We won the Greater Boston District and made it to the finals at the Pine Tree District. We then ranked 1st and placed 3rd in the Sosik Division at the New England District Championship, which cemented our spot at the FIRST Championship in Houston, where we placed fifth in the Curie Division.
Summary:
Our 2025 robot, Geyser, is able to intake Coral from the ground and from the Source, score Coral on L1, L2, L3, and L4, collect Algae from the ground and from the Reef, score Algae in the Processor and in the Net, and climb a Deep Cage at the end of the match.
Weight: 101.2 pounds
Scoring:
Our 2025 robot features a multi-purpose intake for both Coral and Algae, a wrist, an arm, an elevator, and a Deep-Cage climber. Details on these subsystems are coming soon.
Drivebase:
Our drivebase is 28 x 28 inches and uses four WCP Swerve X2i modules with WCP High Grip wheels. Each module uses a Kraken X60 motor for drive and a Kraken X60 motor for steering. As usual, our drivebase's electronics board is mounted on a "brain-pan" with all electrical components facing the floor to allow access from below.
Autonomous:
We have lots of configurable autonomous modes for Reefscape. Our most frequently used autonomous mode starts on either the Barge-side or Processor-side of the field and scores three Coral on L4, including two retrieved from the feeder station. Our center auto is configurable to either score our preloaded Coral onto L4, both score that Coral onto L4 and score two Algae from the Reef into the Barge, or score that Coral onto L4 and score an Algae from the Reef into the Processor.
Achievements:

Win-Loss-Tie record in official play: (50-17-0). Overall: (78-36-0)
Week 0:
- Semifinalists - Second Pick of Alliance 3 (8567, 1768, 5813, 2084)
NE District - Greater Boston Event:
- Winners - First Pick of Alliance 1 (125, 5813, 175)
NE District - Pine Tree Event:
- Finalists - Captain of Alliance 2 (5813, 4909, 8023)
- Creativity Award
New England District Championship - Sosik Division:
- Semifinalists - Captain of Alliance 1 (5813, 1768, 8085)
FIRST Championship - Curie Division:
- Quarterfinalists - First Pick of Alliance 8 (6329, 5813, 4481, 103)
Mayhem in Merrimack:
- Finalists - Captain of Alliance 3 (5813, 319, 157, 501)
Thunder Over New Hampshire:
- Air Show Demonstration Participant
NH Governor's Cup:
- State Championship Winners - Captain of Alliance 1 (5813, 3467, 501)
- Record of (10-0-0)
River Rage:
- Quarterfinalists - Captain of Alliance 1 (5813, 190, 2713, 1100)
Battle of the Bay:
- Semifinalists - First Pick of Alliance 2 (1922, 5813, 1729, 6328B)
2024 Robot - Squall
![]()

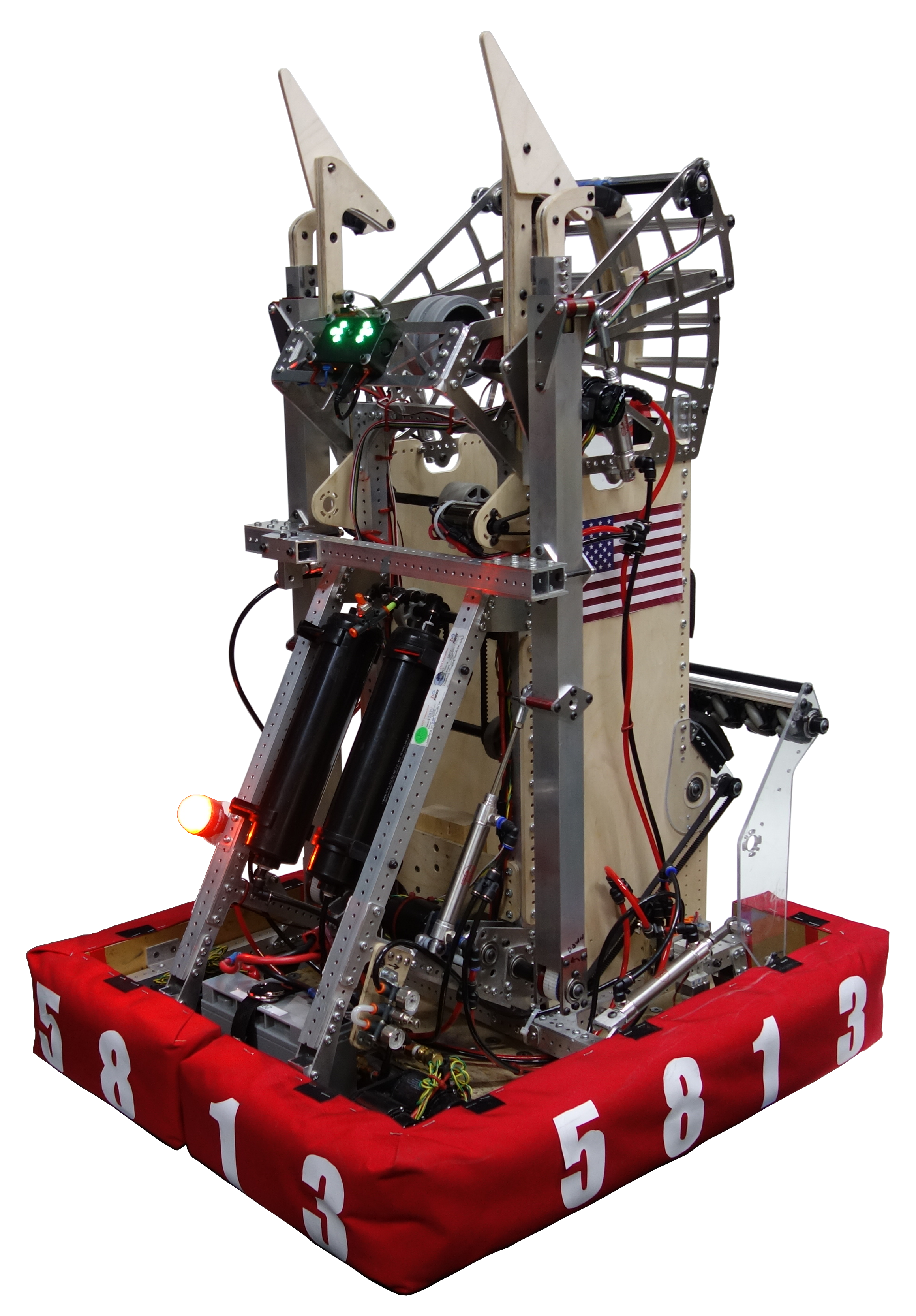
Squall is 5813's robot for the 2024 Crescendo season. In this historic season, the team competed at the BSU District and the UNH District, placed third in the Ganson Division at the New England District Championship, and won the Johnson Division at the 2024 FIRST Championship in Houston, marking our first Einstein appearance.
Summary:
Our 2024 robot, Squall, was able to intake Notes from the floor, score Notes into the Amp, shoot Notes into the Speaker from a wide range of locations around the Wing, and get Onstage and score a Note in the Trap at the end of the match.
Weight: 123.8 pounds
Scoring:
Squall features an under-the-bumper Note intake, a hopper, an adjustable shooter, an elevator, and two climber arms.
The intake mounts to the outside of the drivebase but sits behind the bumpers to help protect it from collisions during autonomous. It features two 775Pro motors which power the two rollers that pull Notes up and into the robot. Passive centering wedges are used to allow the intake to span the full width of the robot. The intake works in conjunction with the Hopper to determine if a note has been indexed into the robot.
The Hopper rides on the elevator and allows us to change our strategy dynamically on-the-fly. If the elevator is down, the Hopper can feed Notes directly into the Shooter. If the elevator is up, the Hopper can be used to deposit Notes in either the Amp or the Trap. There is a powered roller on a passive pivot that allows for scoring in the Trap. In normal use, the Note will push this roller out of the way, but when the Hopper is in the Trap, the Trap's door holds the roller in-position and allows the Note to be redirected straight into the Trap. Passive wheels are mounted on both the Hopper and the trap arm that allow the Hopper to slide on the wall of the Stage while climbing. The Hopper is powered by a 775Pro motor and uses a CTRE mag encoder and a beam-break sensor to position Note properly.
The shooter is a flywheel shooter that uses four sets of orange stealth wheels to propel the Note into the Speaker. The left and right sides of the shooter are powered separately to allow for spin to be introduced into the Note. The shooter's angle is infinitely adjustable and can score from up against the Subwoofer all the way back to the Wing Line. There is a feeder system built-in to the Shooter that allows the Note to be fed into the shooter regardless of what angle the shooter is positioned at. The feeder is powered by a 775Pro motor and uses a CTRE mag encoder for Note positioning. Each side of the shooter's wheels is powered by a single Falcon 500 motor. The Limelight 3 on the elevator is used to track the Speaker's April Tags and allows the robot to adjust the shooter's angle and speed to score in the Speaker from a variety of places around the Wing.
Squall's elevator is a 2-stage continuous elevator with internal rigging. The rigging consists of a single HTD belt that is tensioned with two ratcheting wrenches. Powered by a 775Pro, the elevator stows at a height that can fit under the stage and can then raise the Hopper up to score in either the Amp or the Trap. An energy chain is used to manage the cables for the Hopper.
Two arms with climbing hooks are mounted to the a-frame of the elevator. Powered by a Falcon 500 motor, the climber arms work in conjunction with the Hopper and elevator in order to become Onstage. Once the robot is lined up to the chain, the Hopper is raised to maximum height, the arms pull all the way down, and the Hopper slides up along the Stage wall and lands in the Trap. At that point, the robot is Onstage and can deposit a Note in the Trap.
Drivebase:
Squall features Morpheus' first ever competition Swerve Drive. The drivebase utilizes four WCP Swerve X Flipped modules with VexPro GripLockV2 wheels. Each module uses a Kraken X60 motor for drive and a MiniCIM for steering. The electronics board is inverted and mounted to a "brain pan" to allow for access from below. The drivebase itself measures at 26 x 26 inches, but the robot's overall footprint is 26.5 x 30 inches.
Autonomous:
Squall had a variety of different autonomous modes, but we had three main modes that were used most often. The main mode we ran was a five-Note auto that started in front of the Subwoofer, scored our preloaded Note, picked up and scored the three pre-staged Notes in the Wing, and then drove to the center line to pick up and score one more Note. Before the match, we could set which center line note to pick up. The next autonomous mode is a three-Note auto that starts next to the Amp. In this mode, Squall quickly sneaks around the pre-staged Notes, scores the preloaded Note, and grabs and scores two Notes from the center line. This autonomous is also adjustable pre-match where we can choose the order we pick up the center line notes. Our final main autonomous mode is a 2.5-Note auto that starts on the Source-side of the Subwoofer. This autonomous mode scores the preloaded Note, picks up and scores a note from the center line, and then drives and picks up the center note from the center line.
Achievements:

Win-Loss-Tie record in official play: (41-21-3). Overall: (73-33-4)
NE District - BSU Event:
- Quarterfinalists - Captain of Alliance 2 (5813, 88, 5962)
- Judges' Award
NE District - UNH Event:
- Quarterfinalists - Captain of Alliance 2 (5813, 6324, 4761)
- Autonomous Award
New England District Championship - Ganson Division
- Semifinalists - First Pick of Alliance 5 (58, 5813, 2370)
FIRST Championship - Johnson Division
- Winners - Captain of Alliance 8 (5813, 1477, 3061, 2582)
- Innovation in Control Award
FIRST Championship - Einstein Field
- Championship Quarterfinalists - Captain of the Johnson Alliance (5813, 1477, 3061, 2582)
Battlecry 24
- Quarterfinalists - Captain of Alliance 5 (5813, 4909, 1100)
Summer Heat
- Winners - First pick of Alliance 2 (6328, 5813, 6329B)
NH Governor's Cup
- State Championship Winners - Captain of Alliance 1 (5813, 3467, 7674)
- Winnipesaukee Judges' Award
Battle of the Bay
- Quarterfinalists - First Pick of Alliance 2 (5687, 5813, 6328B)
2023 Robot - Twister


Twister is 5813's robot for the 2023 Charged Up season. This season, we competed at the Rhode Island and North Shore Districts as well as in the Meir Division at the New England District Championship.
Summary:
Our 2023 robot, Twister, was able to intake Cubes and Cones from the floor as well as Cones from the Substations, score Cubes and Cones into any Nodes, and balance on the Charge Station at the end of the match.
Weight: 123 pounds
Scoring:
Twister features a multi-purpose intake for both Cones and Cubes, a 2-stage tilted elevator, a "shuttle" with horizontal extension, and a turret to rotate all of the scoring mechanisms.
The intake uses a combination of three rollers to pick up either Cones or Cubes. Using the two 2-inch compliant wheel rollers, it can pick up tipped or upright Cones. If the intake is rotated to a different angle, one of the compliant wheel rollers and the stealth wheel roller work together to pick up Cubes. The intake can pick up Cones (tipped and upright) and Cubes from the ground, Cones from the Single Substation, and tipped Cones from the Double Substation. All of the rollers are powered by one 775Pro motor.
The 2-stage continuously-rigged elevator is tilted at an angle of 75 degrees from horizontal to allow for scoring in the Hybrid Nodes or the middle row of Nodes without adjusting drivebase position. The elevator is rigged using a single HTD belt that is tensioned using a ratcheting wrench and is powered by a Falcon 500 motor. An energy chain routes the wiring up to the top of the elevator in a controlled manner.
A "shuttle" with one stage of horizontal extension rides up and down in the elevator. When the shuttle extends, it allows Twister to reach the high row of Nodes. The shuttle's horizontal extension is powered by a 775Pro motor. The intake is mounted to a wrist at the end of the shuttle. The wrist is powered by a 775Pro motor and allows the intake to be positioned at any angle for optimal pickup and placement of game pieces.
The entire elevator system is all mounted on-top of a turret. The turret features a unique bearing stack-up utilizing two tapered roller bearings. The turret allows pickup and placement off of any side of the robot. Using a combination of the turret, elevator, and shuttle, Twister can place gamepieces even if the drivebase is not in the right position. The turret is powered by a 775Pro motor, and it's position is controlled using a REV encoder and a Limelight. The gears and sprockets in the turret gearbox are shimmed to reduce backlash.
Drivebase:
Twister features a 6-wheel West Coast Drive with 5-inch Colson Wheels powered by 4 Falcon 500 motors with WCP gearboxes. Electronics are mounted upside down on a "brain pan" and are protected by a steel belly pan. The drivebase is 26 x 28 inches and is small enough to allow three robots to engage on the Charge Station.
Autonomous:
Twister has several autonomous modes. One autonomous scores a Cone on a high Node and then balances on the Charge Station. Another Charge Station auto scores a Cone high, leave the Community, and then engage on the Charge Station. Two other autonomous modes start on either side of the Charge Station, place a Cone high, leave the Community, grab a Cube from the center of the field, and score the Cube high.
Achievements:
Win-Loss-Tie record in official play: (29-16-2). Overall: (37-28-2)
NE District - Rhode Island Event:
- Semifinalists - Captain of Alliance 3 (5813, 2877, 4908)
- Innovation in Control Award Sponsored by Rockwell Automation
NE District - North Shore Event:
- Semifinalists - Captain of Alliance 4 (5813, 138, 5735)
New England District Championship - Meir Division:
- Quarterfinalists - Second Pick of Alliance 6 (3205, 6324, 5813)
Battlecry 23:
- Eighthfinalists - Captain of Alliance 14 (5813, 166, 1729, 501)
Thunder Over New Hampshire
- Air Show Demonstration Participant
Mayhem in Merrimack
- Semifinalists - Captain of Alliance 6 (5813, 319, 1922, 6762)
2022 Robot - Flagnado

Flagnado is 5813's robot of the 2022 Rapid React season. This season, we won the Pine Tree District and the North Shore District and competed in the Roebling Division at the FIRST Championship in Houston, Texas.
Summary:
Our 2022 robot, Flagnado, was able to intake Cargo from the floor, score Cargo into the Upper Hub from a variety of locations around the field, and climb to the Traversal Bar at the end of the match.
Weight: 92 pounds
Scoring:
Flagnado features a Cargo intake, a conveyor, a shooter with adjustable hood, and a climbing mechanism consisting of two telescoping-arm climbers and two passive "dino" hooks.
The Cargo intake deploys using two pneumatic cylinders and uses mecanum wheels to center the Cargo and pull them into the robot over the frame. The intake wheels are powered by a 775Pro. Working in combination with the conveyor and a color sensor, the intake is able to eject Cargo belonging to the opposite alliance.
The conveyor consists of several rollers and belts that bring Cargo from the intake to the shooter. The conveyor can hold two Cargo and can feed them into the shooter one-at-a-time. The conveyor system is powered by three 775Pro motors and features a REV color sensor to detect the color of the Cargo.
The shooter is a flywheel shooter with two rollers and a pneumatically-adjustable hood with two positions. When the hood is down, the robot can score when pushed up against the Fenders. When the hood is up, the robot can score from a wide range of locations around the field. Using the Limelight camera, the speeds of the two shooter rollers is adjusted depending on the distance from the goal. The lower 4-inch stealth-wheel roller is powered by a Falcon 500 motor while the upper 1-inch stealth wheel roller is powered by a 775Pro motor.
The climber consists of two passive "dino" hooks and two articulating telescoping arms. The climber can climb onto any of the four climbing rungs and can autonomously climb from the ground to the Traversal Rung in 8.5 seconds. The telescoping arms are powered by a Falcon 500 motor and are actuated by 3 pneumatic cylinders.
Drivebase:
Flagnado features the next iteration on our 6-wheel West Coast Drive with 4-inch Colson Wheels. Each side of the drivebase is powered by two Falcon 500 motors in a WCP flipped gearbox. The electronics board is mounted to a "brain pan" and is protected by a steel belly pan which also adds ballast. The drivebase is 23 x 27 inches and is small enough to enable a triple traversal climb.
Autonomous:
Flagnado has award-winning autonomous programs. A 2-ball autonomous drives back, picks up a second Cargo, and scores two Cargo into the Upper Hub. A 3-ball auto starts on the Terminal side of the field, drives and picks up one more Cargo, shoots two Cargo high, and then drives, picks up, and shoots one more Cargo. Our first 4-ball autonomous starts in the Tarmac closest to the Terminal, drives back, picks up one more Cargo, shoots two Cargo high, and then drives to the Terminal, picks up two Cargo, and shoots them high. Our second 4-ball auto starts in the Tarmac closest to the Hangar, drives back, picks up one more Cargo, shoots two Cargo high, and then drives through the Hangar to the Terminal where it picks up two more Cargo and shoots them high. Our final autonomous is a 5-ball auto that starts the same as our 3-ball auto but extends it by driving to the Terminal to pick up and score two more Cargo.
Achievements:

Win-Loss-Tie record in official play: (40-7-0). Overall: (90-28-1)
Week 0:
- Finalists - First Pick of Alliance 3 (58, 5813, 501)
NE District - Pine Tree Event:
- Winners - Captain of Alliance 3 (5813, 4564, 8023)
- Autonomous Award Sponsored by Ford
NE District - North Shore Event:
- Winners - Captain of Alliance 1 (5813, 125, 5563)
- Innovation in Control Award Sponsored by Rockwell Automation
FIRST Championship - Roebling Division:
- Roebling Division Competitor
Battlecry 22:
- Semifinalists - Captain of Alliance 5 (5813, 195, 716, 467)
Summer Heat:
- Semifinalists - First Pick of Alliance 5 (4564, 5813, 2713, 5265)
Mayhem in Merrimack:
- Semifinalists - First Pick of Alliance 3 (319, 5813, 1922, 3467B)
NH Governor's Cup:
- State Championship Finalists - Captain of Alliance 2 (5813, 319, 3467B)
Battle of the Bay:
- Finalists - Captain of Alliance 2 (5813, 319, 7314)
2021 At-Home Robot - Microburst:

Microburst is 5813's robot for the 2021 Infinite Recharge at Home season. This season, we competed in the Scandium Group in the Infinite Recharge at Home challenges and placed third overall.
Summary:
Our 2021 robot, Microburst, is a small, cost-effective, and lightweight robot specifically designed to compete in the Infinite Recharge at Home challenges. Microburst is able to intake Power Cells, store them, and score them in both the Outer and Inner Ports from a range of distances on the field.
Weight: 65 pounds
Scoring:
Microburst features a Power Cell intake, a brushed rotary hopper, and a shooter with deployable hood.
The full-width intake starts folded up into the back of the hopper at the start of the challenge, held in position by a polycarbonate hook. When the intake spins, the hook passively retracts, allowing the intake to fold down into position. The intake is powered by a 775Pro motor and has three horizontal rollers that grab the Power Cells and move them into the hopper. Once the intake deploys, it stays out for the rest of the challenge.
The hopper can hold up to 5 Power Cells and uses a brushed system to move the power cells into the feeder tower. The feeder tower uses two wheels to propel the Power Cells from the hopper into the shooter. The hopper is run by a single 775Pro motor, and the feeder tower is run by a single 775Pro motor.
The backspin shooter is powered by three 775Pro motors and uses two 6-inch Colson wheels on a single shaft to launch the power cells into the Power Ports. A Limelight 2+ is used to track the goal. The hood has two positions. One position is held in place using a hook that is connected to the hook that holds up the intake at the start of the challenge. When the intake rollers spin, the hooks deploy both the intake and the hood. When the hood is held back by the hook, Microburst can score into the Power Port from the Green Zone of the Interstellar Accuracy challenge. When the hood is deployed, Microburst can score power cells from anywhere else on the field. The hood can start in either position, but once the hood is deployed, it cannot be retracted.
Drivebase:
Microbust features a 6-wheel West Coast Drive with 4-inch Colson Wheels. The drivebase is powered by four Falcon 500 motors in a WCP gearbox, features a "brain pan" electronics board, and is the smallest drivebase we've ever done, measuring in at just 22 x 24.5 inches. The drivebase is small enough to be able to fit between the markers in the at-home challenges with plenty of room to spare, which was very useful in both the Autonav and Hyperdrive challenges.
Autonomous:
In the at-home challenges, Microburst used autonomous modes in three of the five challenges.
For the Galactic Search challenge, Microburst was able to detect the locations of Power Cells on the field using a Limelight 2+ and determine which path to follow to collect the three Power Cells.
In the Autonav challenge, there were autonomous modes for the Barrel Racing Path, the Slalom Path, and the Bounce Path that quickly moved the robot through the intricate paths without hitting the markers.
In order to make the Power Port challenge more repeatable and as fast as possible, an autonomous path was created to move Microburst from the Re-Introduction Zone to the Scoring Zone, shoot three Power Cells into the Power Port, and drive back into the Re-Introduction Zone. Once the human players reloaded Microburst's hopper, the driver could press a button to rerun the same path for maximum repeatability between cycles.
Achievements:
Infinite Recharge at Home Challenge - Scandium Group:
- 3rd Place Overall: Overall Score of 444.16 points (out of a possible 450.00)
- Power Port: 1st Place - Raw Score: 78 Points - Computed Score: 150.00
- Interstellar Accuracy: 1st Place (Tie) - Raw Score: 44 Points - Computed Score: 150.00
- Hyperdrive: 3rd Place - Raw Score: 48.9 Seconds - Computed Score: 144.16
- Autonav: 4th Place - Raw Score: 37.5 Seconds - Computed Score: 128.16
- Galactic Search: 4th Place - Raw Score: 12.8 Seconds - Computed Score: 133.82
Thunder Over New Hampshire:
- Air Show Demonstration Participant
2020 / 2021 Robot - Tornado:
Tornado is 5813's robot for the 2020 and 2021 Infinite Recharge seasons. Unfortunately, all official events for 2020 were cancelled, so this robot will only be competing at offseason events in 2021. At the Battlecry 21 offseason series, we were semifinalists the first day and winners the second day. In the Fall, we won the River Rage offseason event and the New Hampshire Governor's Cup.
Summary:
Our 2020/2021 robot, Tornado, is able to intake power cells from the floor, shoot power cells into the outer port or inner port from almost anywhere on the field, spin the control panel, and climb on the switch at the end of the match. It can also drive under the trench run.
Weight: 103 pounds (2020)
Weight: 110 pounds (2021)
Scoring:
Tornado features a power cell intake, a cyclone hopper and feeder, a shooter with adjustable hood, a control panel mechanism, and two telescoping-arm climbers.
The power cell intake is a pneumatically-actuated non-parallel 4-bar that extends over the bumper to intake power cells from the field into the cyclone hopper. The three rollers are powered by a 775Pro motor.
The cyclone hopper, which can hold up to six power cells, spins around the center feeder column. The power cells do not move relative to each other, so the potential for jamming is decreased. The center feeder column has an omni wheel that sits in the hopper. When the omni wheel is turned on, the combination of the omni wheel and the spinning hopper bring power cells up the center column and into the shooter. If the feeder did experience a jam, an automatic unjam sequence would activate and clear the jam, allowing us to keep scoring.
The shooter featured 6-inch Colson wheels and was powered by two Falcon 500 motors. It also featured a pneumatically actuated hood that allowed the robot to score from the fender, the initiation line, and the front of the Trench.
Our control panel mechanisms attaches to the superstructure holding the shooter in place. It spins the control panel using Banebots compliant wheels and is powered by a Bag motor connected to a Versaplanetary gearbox. A pneumatic cylinder is used to fold the control panel mechanism up into position when it is time to spin the control panel.
The climber is powered by a single 775Pro motor and holds its position using a pneumatic shifting brake. The arms start the match folded down on top of the hopper and deploy using a pneumatic cylinder when it is time to climb.
Drive base:
Tornado uses a six-wheel West Coast Drive with 6-inch Colson wheels. The drivebase uses custom, two-Falcon 500 gearboxes and features a "brain pan" electronics board.
Autonomous:
Tornado has many different autonomous options. An 8-ball auto shoots 3 power cells, picks up 5 additional power cells from the trench run, and scores them. A 6-ball auto shoots 3 power cells, picks up 3 more from the trench run, and scores them. A 5-ball auto starts near the opponent's trench run, picks up 2 power cells from the opponent's trench run, and scores the power cells. Tornado also has a 3-ball auto that shoots three power cells into the power port and drives off of the initiation line; this auto can be configured to drive either forward or backwards.
Achievements:
2020:
Win-Loss-Tie record in official play: (0-0-0). Overall: (0-0-0)
NH Governor's Cup:
- The CAD is Strong with This One Award
2021:
Win-Loss-Tie record in official play: (0-0-0). Overall: (42-9-0)
Battlecry 21 - Saturday:
- Semifinalists - First Pick of Alliance 2 (131, 5813, 2067, 3461)
Battlecry 21 - Sunday:
- Winners - Captain of Alliance 1 (5813, 88, 3623, 4176)
- Record of (14-0-0)
River Rage:
- Winners - Captain of Alliance 1 (5813, 238, 131, 6763)
- Record of (13-0-0)
NH Governor's Cup hosted by Battle of the Bay:
- State Championship Winners - First Pick of Alliance 1 (133, 5813, 6690)
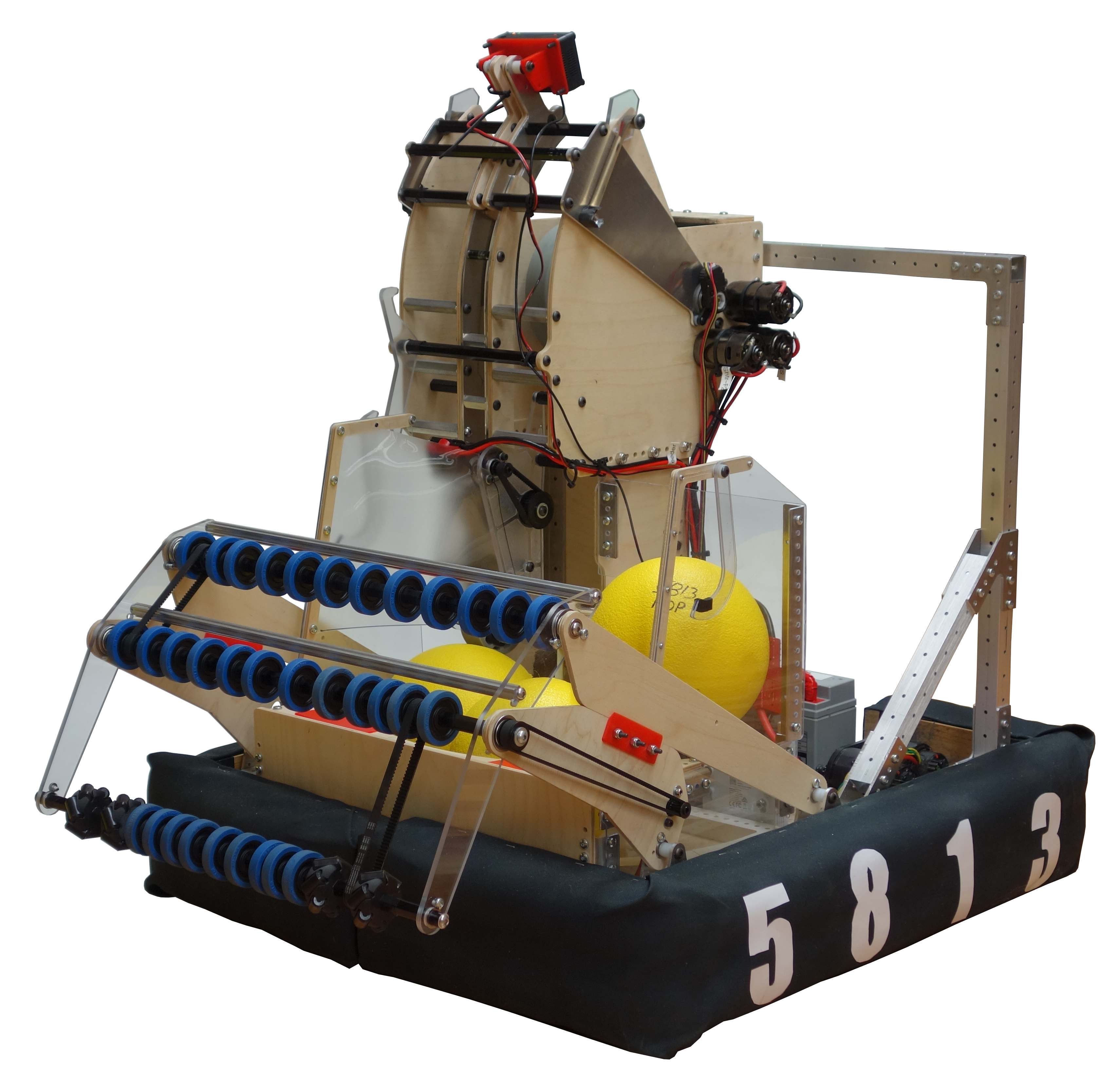
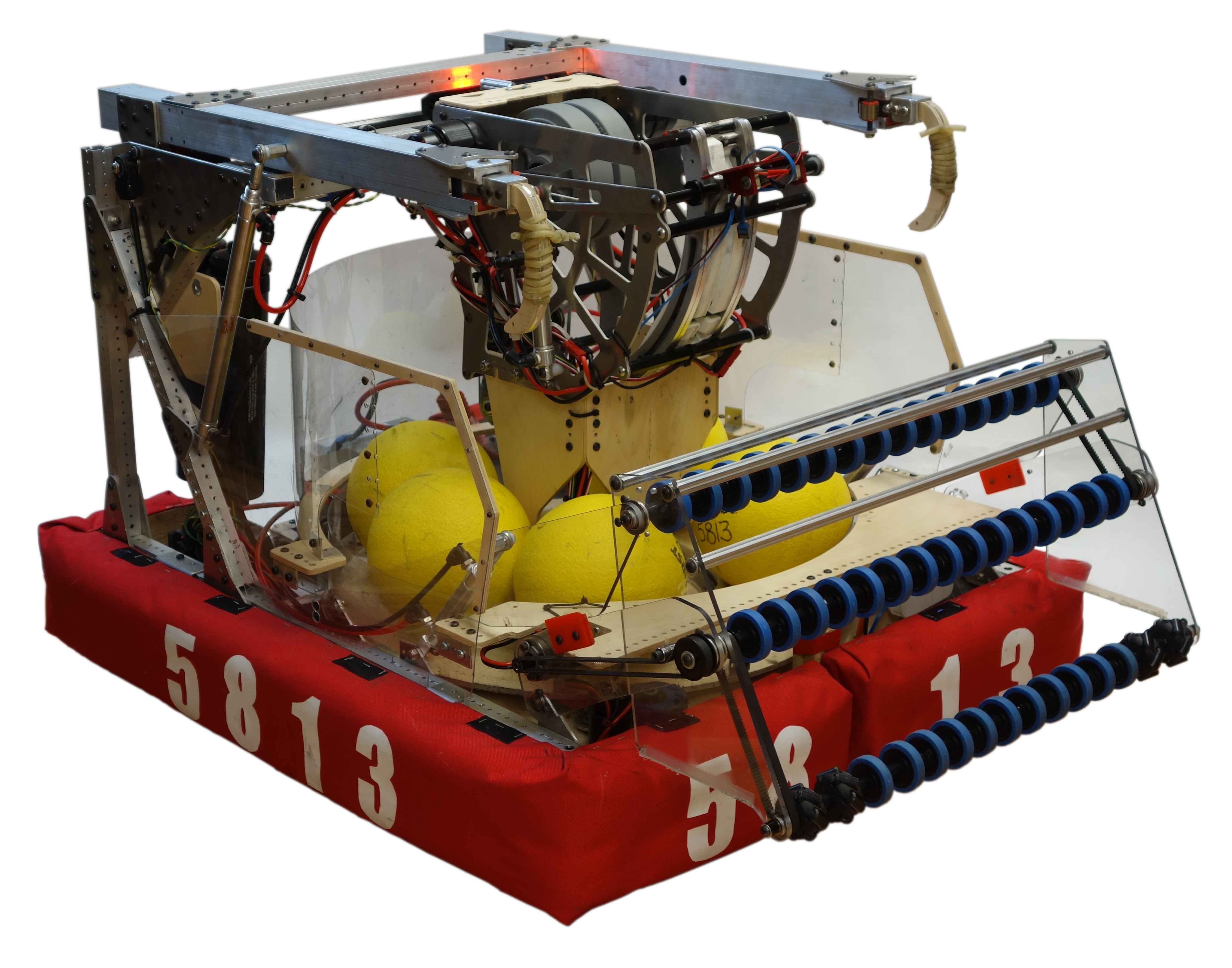
2019 Robot - Anonnado:

Anonnado is 5813's robot for the 2019 Destination: Deep Space competition season. This season, our two District Events were the SE Mass event in Week 2 and the Central Mass event in Week 5. At the SE Mass competition, our safety captain won Safety Star of the Day, and the team made it to the finals. Then, at the Central Mass competition, we made it to the semifinals and won the Autonomous Award. We were excited to qualify for the prestigious New England District Championship for the fourth time in our Team history!
Summary:
Our 2019 robot, Anonnado, is able to collect hatch panels from the feeder station, collect cargo from the ground, place hatch panels and cargo anywhere on the Rocket or Cargo Ship, and climb to HAB level 3 at the end of the match.
Weight: 124.9 pounds
Scoring:
Anonnado features a multi-purpose intake, a 2-stage continuous elevator, and a suction climber.
The intake has two modes: cargo mode and hatch panel mode. In cargo mode, the intake opens up and rotates down to pick up the cargo. A horizontal roller pulls the cargo into two vertical side-rollers. The intake then rotates up to score on the Rocket and stays rotated down to score in the Cargo Ship. The two vertical side-rollers are on a pivot. When the arms pivot together, the rollers collect hatch panels from the feeder station. The wheels spin in the opposite direction to place the hatch panels.
The elevator is a 2-stage continuous elevator that can travel up to place cargo and hatch panels up to level 3 of the Rocket. The elevator is powered off of a custom 4-775Pro gearbox that uses a ball shifter to activate a braking mechanism.
At the end of the match, a pneumatic cylinder deploys the suction climber, which is on a separate elevator. After the climber is deployed, the suction pad adheres to the top platform of HAB level 3 using a suction pump. After the pad is adhered sufficiently, the climber arm is pulled down the elevator until Anonnado's bumpers are elevated above HAB level 3. The suction pad does not take up much space on the HAB 3 platform, which allows multiple-robot-climbs.
Drive base:
Anonnado uses a six-wheel West Coast Drive with four six-inch Colson wheels towards the front of the robot and two six-inch VEX Pro Omni wheels on the back of the robot. The drivebase uses 4 NEO motors with a VEX Pro Ball Shifter gearbox.
Autonomous/Sandstorm:
Anonnado's award winning autonomous starts on HAB level 1, drives to the back of either Rocket, and switches to driver control. This allows the driver to place a hatch panel on the back of the Rocket. In Sandstorm, the robot can also start on HAB level 2 and place a hatch panel on the front of the Cargo Ship.
Achievements:

Win-Loss-Tie record in official play: (22-25-1). Overall: (52-52-3)
Week 0:
- Quarterfinalists - First Pick of Alliance 7 (3467, 5813, 3986)
NE District - SE Mass Event:
- District Event Finalists - Second Pick of Alliance 3 (69, 88, 5813)
- Safety Star of the Day
NE District - Central Mass Event:
- Semifinalists - First Pick of Alliance 4 (190, 5813, 7438)
- Autonomous Award sponsored by Ford
New England District Championship:
- District Championship Competitor
Battlecry 20:
- Quarterfinalists - First Pick of Alliance 5 (100, 5813, 5556, 2084)
Summer Heat:
- Finalists - First Pick of Alliance 6 (4311, 5813, 4564B)
NH Governor's Cup:
- Semifinalists - First Pick of Alliance 4 (238, 5813, 3323)
- Mill Yard Creativity Award
River Rage:
- Semifinalists - Pick of Alliance 2 (78, 501, 5813)
- Spookiest Team Award
Battle of the Bay:
- Semifinalists - First Pick of Alliance 5 (4564, 5813, 58, 157)
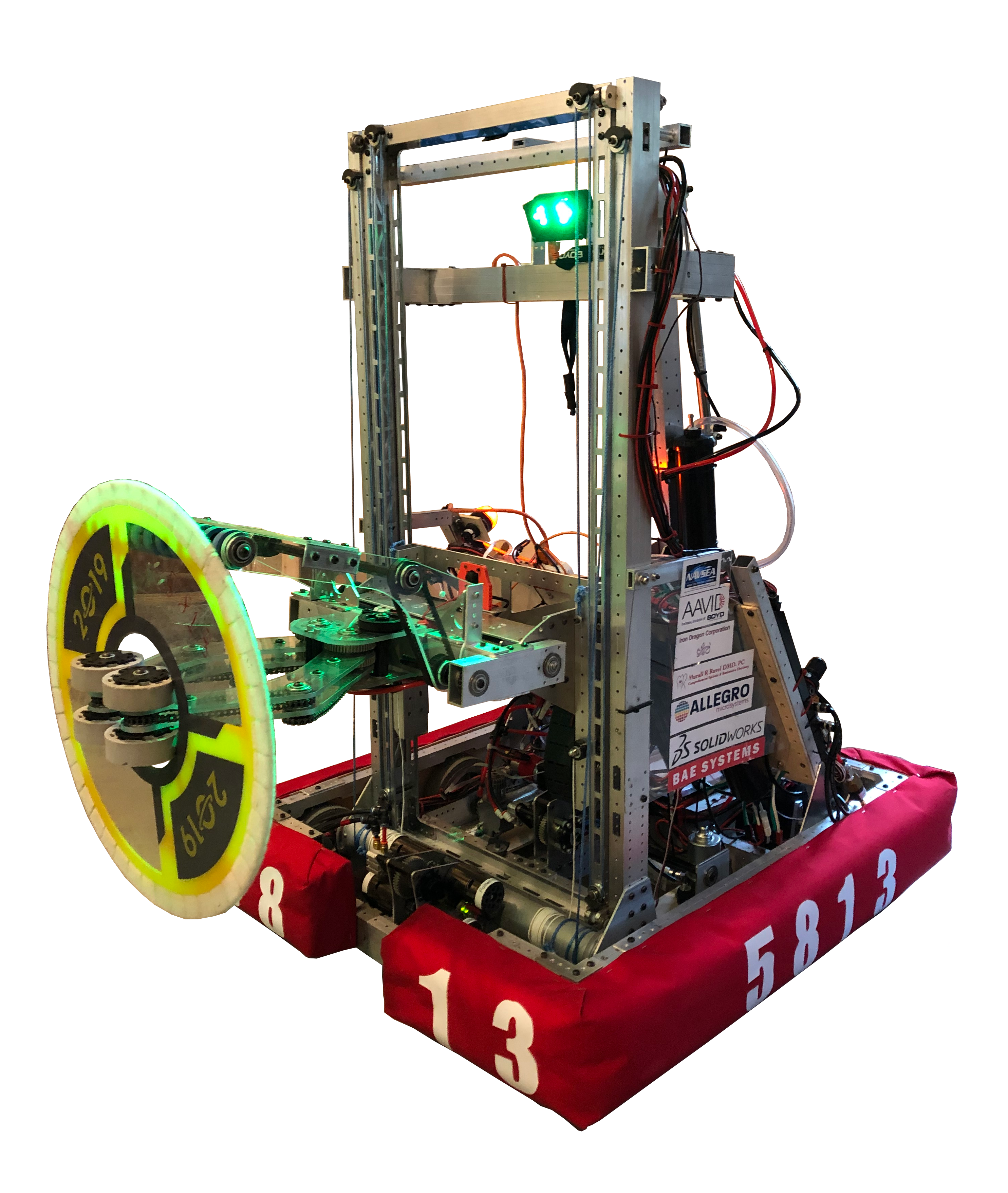
2018 Robot - Insomnado:
![]()
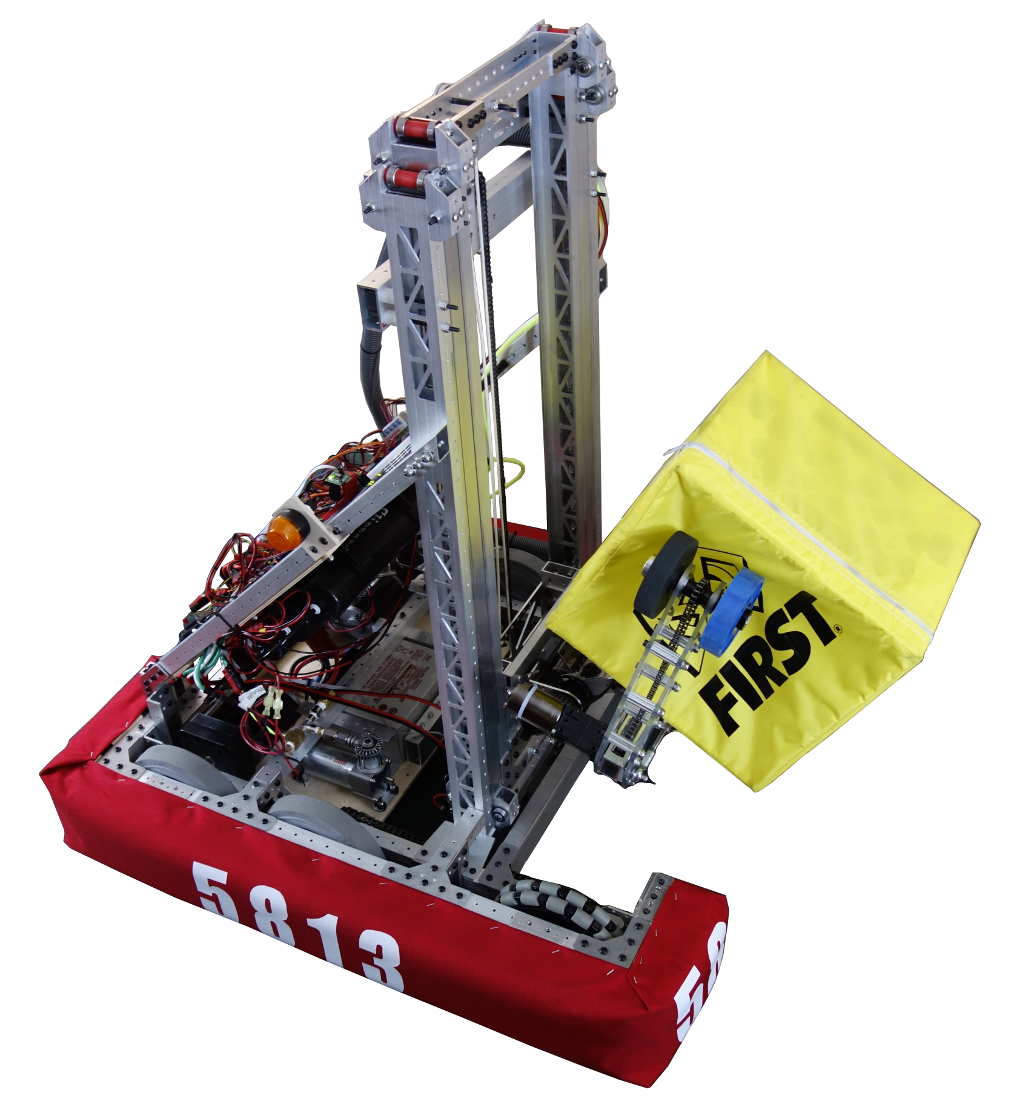
Insomnado is 5813's robot for the 2018 FIRST Power Up competition season. This season was our most successful season yet! At the official Week 0 event, we captained our alliance to the finals. We were semifinalists at the SE Mass District and won the Innovation in Control Award. At the UNH District, we made it to the finals where we qualified for the New England District Championship. To wrap up our season, we made it to the quarterfinals in the Curie Subdivision at the Detroit Championship.
Summary:
Our 2018 robot, Insomnado, is able to intake cubes in any orientation; place cubes in the exchange, switch, and scale; park on the platform at the end of the match; and climb onto the rung.
Weight: 119.2 pounds
Scoring:
Insomnado features a cube intake, a wrist, a 3-stage cascading elevator, and a climber.
The cube intake can intake cubes in any possible orientation and can either shoot it out using the intake wheels or drop the cube by pneumatically opening the claw.
The wrist rides on the shuttle, which is the final elevator stage, and can rotate to position the intake at different angles. Once the shuttle reaches the top of the elevator, the wrist can flip back and score cubes out the back of the robot.
The elevator is a 3-stage cascading elevator that can reach up to place a cube on top of a stack of two cubes in the upper scale position. Our elevator and climber are run off of a custom 4-775Pro gearbox that uses a pneumatic shifter to switch between powering the elevator and powering the climber.
At the end of the match, our climber arm extends and places the hook on the rung. After the hook is placed, our elevator/climber gearbox reels in the hook and pulls our robot off the ground and into scoring position.
Drive base:
Insomnado uses a six-wheel West Coast Drive with four eight-inch Colson wheels towards the back of the robot and two eight-inch VEX Pro Omni wheels on the front of the robot. The drivebase uses 4 CIM motors.
Autonomous:
Insomnado has several autonomous modes. Our first 2018 auto starts in the center of the alliance wall and places one cube in our alliance-colored switch within three seconds into autonomous. Another autonomous mode starts on the left side of the field and places a cube in the correct scale plate. Additionally, we have a two-cube-center-switch auto, a near-side scale auto starting on the right, as well as a single cube side-switch auto that can start on either side of the field.
Achievements:

Win-Loss-Tie record in official play: (42-17-0). Overall: (93-34-1)
Week 0:
- Finalists - Captain of Alliance 3 (5813, 78, 5459)
NE District - SE Mass Event:
- Semifinalists - First Pick of Alliance 3 (4041, 5813, 2079)
- Innovation in Control Award sponsored by Rockwell Automation
NE District - UNH Event:
- District Event Finalists - First Pick of Alliance 2 (138, 5813, 5506)
New England District Championship:
- Championship Qualifying Team
FIRST Championship - Detroit - Curie Subdivision:
- Quarterfinalists - Captain of Alliance 5 (5813, 2175, 316, 503)
Battlecry 19:
- Semifinalists - Captain of Alliance 2 (5813, 2168, 3719)
- General Staff Award
Mayhem in Merrimack:
- Semifinalists - Captain of Alliance 1 (5813, 1519, 5962)
- Gracious Professionalism Award
Summer Heat:
- Finalists - First Pick of Alliance 2 (131, 5813, 6153)
River Rage:
- Winners - Pick of Alliance 2 (131, 319, 5813)
Battle of the Bay:
- Semifinalists - First Pick of Alliance 1 (319, 5813, 4925)
2017 Robot - Torquenado:
![]()
Torquenado is 5813's robot for the 2017 FIRST Steamworks challenge. This season was a very successful season for us! We were Quarterfinalists at WPI, Semifinalists at Southern NH, Finalists at the New England District Championship, and competitors in the Carson Subdivision at the FIRST Championship in St. Louis, Missouri.
Summary:
Our 2017 robot, Torquenado, is able to retrieve gears for the airship, score fuel in the high efficiency boiler, and climb the rope to board the airship at the end of the match.
Weight: 113 pounds
Scoring:
Torquenado is equipped with a gear mechanism, a fuel intake, a fuel tank, a dual-stream shooter, and a power-takeoff climber.
The gear mechanism, nicknamed the "Gear Goblin" by our team, is located on the front of the robot and uses two sets of horizontal rollers to pick up gears from the ground. After a gear is collected, the Gear Goblin rotates up to place the gears on the airship pegs. A wide field camera is mounted above the Gear Goblin so the drive team can see gears that they would not be able to see otherwise.
The fuel intake is located underneath the Gear Goblin, so that fuel can be collected into the fuel tank when the Gear Goblin is rotated up.
The fuel tank can hold about 50 fuel elements and can be loaded by either a hopper or the fuel intake. Using agitators, belts, and rollers, the fuel tank feeds fuel into the shooter.
The flywheel shooter has two channels, which allow two streams of fuel to be shot at once. The shooter uses four-inch Andymark compliant wheels to launch the fuel.
Behind the shooter is our power-takeoff climber. The climber is driven by all four CIM motors in our drivebase, which allows for a quick climb.
Drive base:
Torquenado uses an eight-wheel West Coast Drive with four four-inch Colson wheels on each side of the drive base. Four CIM motors are used in the West Coast Drive.
Autonomous:
Torqeuado has autonomous modes that can place a gear on any of the three pegs. Additionally, we have autos that place a gear on the side peg and shoot 10 fuel into the boiler.
Achievements:


Win-Loss-Tie record in official play: (33-27-0). Overall: (53-45-0)
NE District - WPI Event:
- Quarterfinalists - First Pick of Alliance 3 (501, 5813, 839)
NE District - Southern NH Event:
- Semifinalists - First Pick of Alliance 2 (131, 5813, 4034)
- Creativity Award sponsored by Xerox
New England District Championship:
- District Championship Finalists - Second Pick of Alliance 3 (3719, 1519, 5813)
FIRST Championship - St. Louis - Carson Subdivision
- Carson Subdivision Competitor
Battlecry 18:
- Quarterfinalists - First Pick of Alliance 5 (5030, 5813, 138)
Beantown Blitz:
- Semifinalists - First Pick of Alliance 2 (20, 5813, 1761)
River Rage:
- Quarterfinalists - First Pick of Alliance 5 (6324, 5813, 4909, 6328)
Battle of the Bay:
- Quarterfinalists - First Pick of Alliance 5 (501, 5813, 2648)
2016 Robot - Goatnado:
![]()

Goatnado is 5813's robot for the 2016 FIRST Stronghold challenge. This season was a big success for 5813. We were Semifinalists at the WPI and UNH district events and an an alliance captain in the Galileo Subdivision at the FIRST Championship in St. Louis, Missouri.
Summary:
Our 2016 robot, Goatnado, is able to retrieve boulders, shoot boulders into the high goal, cross defenses, and challenge the tower at the end of the match.
Weight: 83.5 pounds
Scoring:
Goatnado is equipped with a boulder intake/defense manipulator, feeder, and shooter.
The boulder intake/defense manipulator, nicknamed Swagnado by our team, uses mecanum wheels to center the boulder as it is picked up by the feeder. The Swagnado is also used to push down the cheval de frise defense and lift up the portcullis by spinning the wheels out.
Once the flywheel shooter is spun up to the correct speed, the feeder propels the boulder into the shooter.
The shooter uses four-inch Colson wheels to launch the boulder into the high goal.
Goatnado can drive under the low bar and cross all Class A, B, and D defenses. Additionally, Goatnado can back through the sally port, spin around, and drive back across to weaken/damage that defense.
Drive base:
Goatnado uses a six-wheel West Coast Drive driven by four CIM motors. The drive base uses three eight-inch pneumatic wheels on each side and is able to traverse all defenses, including the low bar, rough terrain, rock wall, moat, ramparts, cheval de frise, sally port, and portcullis.
Autonomous:
In autonomous, Goatnado can cross the low bar, rough terrain, rock wall, cheval de frise, and portcullis defenses. Additionally, we have an auto that crosses the low bar and shoots a boulder into the left high goal.
Achievements:


Win-Loss-Tie record in official play: (32-28-0). Overall: (66-40-0)
NE District - WPI Event:
- Semifinalists - First Pick of Alliance 2 (126, 5813, 2370)
- Highest Rookie Seed Award
- Rookie All Star Award
NE District - UNH Event:
- Semifinalists - First Pick of Alliance 4 (4909, 5813, 138)
- Rookie Inspiration Award sponsored by National Instruments
New England District Championship:
- Championship Qualifying Team
FIRST Championship - Galileo Subdivision:
- Quarterfinalists - Captain of Alliance 5 (5813, 2468, 1153, 2907)
- Highest Rookie Seed Award
Battlecry 17:
- Semifinalists - First Pick of Alliance 3 (2877, 5813, 1474)
Beantown Blitz:
- Finalists - Captain of Alliance 2 (5813, 2877, 5969)
River Rage:
- Winners - Captain of Alliance 1 (5813, 238, 1058)
Battle of the Bay:
- Semifinalists - First Pick of Alliance 3 (131, 5813, 4546)
2015 Robot - Totenado:


Totenado is 5813's pre-rookie robot for the 2015 Recycle Rush challenge. We used this project as an opportunity to learn how to use Solidworks and VEX Pro components. We had a great time and were Semifinalists at Battle of the Bay.
Summary:
Our 2015 robot, Totenado, is able to grab recycling containers from the step, pick up sideways recycling containers, intake totes, cap five-tote-tall stacks with a recycling container, and make stacks up to six-totes tall with a recycling container.
Weight: 85 pounds
Scoring:
Totenado is equipped with a tote intake, an internal indexing stacking system, a recycling container claw, and two arms that grab a recycling container from the step.
The recycling container claw can rotate to pick up sideways cans. After a recycling container is grabbed, the claw rotates to make the recycling container vertical. The claw rides on the top of the stack inside Totenado; that way, there is always pressure holding the stack down from the top.
The two sides of the tote intake both have two Banebots wheels that spin to intake totes from either the landfill or the chute door.
Once the totes are inside the robot, the internal indexing stacking system lifts the totes to create stacks up to six-totes tall.
Once the landfill is partially cleared, the two arms on the back of Totenado can rotate back and use the surgical tubing between them to pull a recycling container off of the step.
Drive base:
Totenado uses a six-wheel West Coast Drive powered by two CIM motors. The front and back wheels are four-inch Vex Pro omni wheels, and the center wheels are four-inch Colson wheels.
Autonomous:
In autonomous, Totenado can drive into the auto zone.
Achievements:
Battle of the Bay:
- Semifinalists - First Pick of Alliance 4 (125, 5813, 58)
- Just Because Award